
Colin Graber
Hello! I am a final year PhD Candidate at the University of Illinois at Urbana-Champaign. My research focuses on computer vision, trajectory and other types of forecasting, and interaction modeling.
Publications
Panoptic Segmentation Forecasting
Paper CodePublished in CVPR, 2021
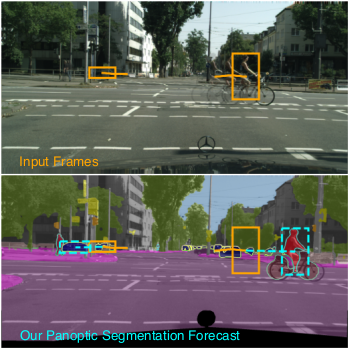
Our goal is to forecast the near future given a set of recent observations. We think this ability to forecast, i.e., to anticipate, is integral for the success of autonomous agents which need not only passively analyze an observation but also must react to it in real-time. Importantly, accurate forecasting hinges upon the chosen scene decomposition. We think that superior forecasting can be achieved by decomposing a dynamic scene into individual 'things' and background 'stuff'. Background 'stuff' largely moves because of camera motion, while foreground 'things' move because of both camera and individual object motion. Following this decomposition, we introduce panoptic segmentation forecasting. Panoptic segmentation forecasting opens up a middle-ground between existing extremes, which either forecast instance trajectories or predict the appearance of future image frames. To address this task we develop a two-component model: one component learns the dynamics of the background stuff by anticipating odometry, the other one anticipates the dynamics of detected things. We establish a leaderboard for this novel task, and validate a state-of-the-art model that outperforms available baselines.
Dynamic Neural Relational Inference
Paper CodePublished in CVPR, 2020
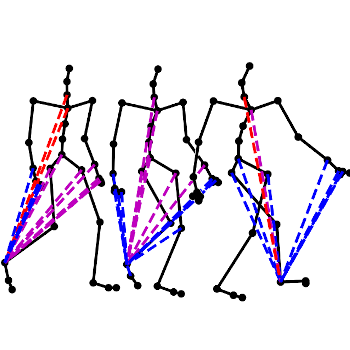
Understanding interactions between entities, e.g., joints of the human body, team sports players, etc., is crucial for tasks like forecasting. However, interactions between entities are commonly not observed and often hard to quantify. To address this challenge, recently, `Neural Relational Inference' was introduced. It predicts static relations between entities in a system and provides an interpretable representation of the underlying system dynamics that are used for better trajectory forecasting. However, generally, relations between entities change as time progresses. Hence, static relations improperly model the data. In response to this, we develop Dynamic Neural Relational Inference (dNRI), which incorporates insights from sequential latent variable models to predict separate relation graphs for every time-step. We demonstrate on several real-world datasets that modeling dynamic relations improves forecasting of complex trajectories.
Graph Structured Prediction Energy Networks
Paper CodePublished in NeurIPS, 2019
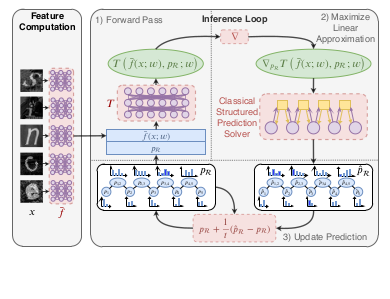
For joint inference over multiple variables, a variety of structured prediction techniques have been developed to model correlations among variables and thereby improve predictions. However, many classical approaches suffer from one of two primary drawbacks: they either lack the ability to model high-order correlations among variables while maintaining computationally tractable inference, or they do not allow to explicitly model known correlations. To address this shortcoming, we introduce `Graph Structured Prediction Energy Networks,' for which we develop inference techniques that allow to both model explicit local and implicit higher-order correlations while maintaining tractability of inference. We apply the proposed method to tasks from the natural language processing and computer vision domain and demonstrate its general utility.
Deep Structured Prediction with Nonlinear Output Transformations
Paper CodePublished in NeurIPS, 2018
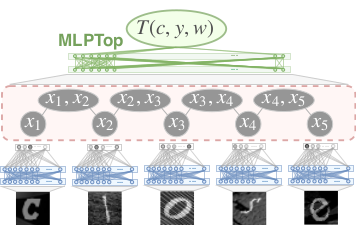
Deep structured models are widely used for tasks like semantic segmentation, where explicit correlations between variables provide important prior information which generally helps to reduce the data needs of deep nets. However, current deep structured models are restricted by oftentimes very local neighborhood structure, which cannot be increased for computational complexity reasons, and by the fact that the output configuration, or a representation thereof, cannot be transformed further. Very recent approaches which address those issues include graphical model inference inside deep nets so as to permit subsequent non-linear output space transformations. However, optimization of those formulations is challenging and not well understood. Here, we develop a novel model which generalizes existing approaches, such as structured prediction energy networks, and discuss a formulation which maintains applicability of existing inference techniques.